Skip to main content
Hierarchical Computations on Manycore Architectures
Hierarchical Computations on Manycore Architectures
Main navigation
Home
People
All Profiles
Principal Investigators
Research Scientists
Postdoctoral Fellows
Alumni
Former Members
Events
All Events
Events Calendar
News
Research
Partnerships
Software Projects
Join Us
Contact Us
Muti-agent deep reinforcement learning
KAUST researchers propose a distributed coordination framework for heterogeneous non-terrestrial networks
2 min read ·
Wed, Nov 12 2025
Press Releases
NTN Communication
Muti-agent deep reinforcement learning
UAV communications
HAPSs
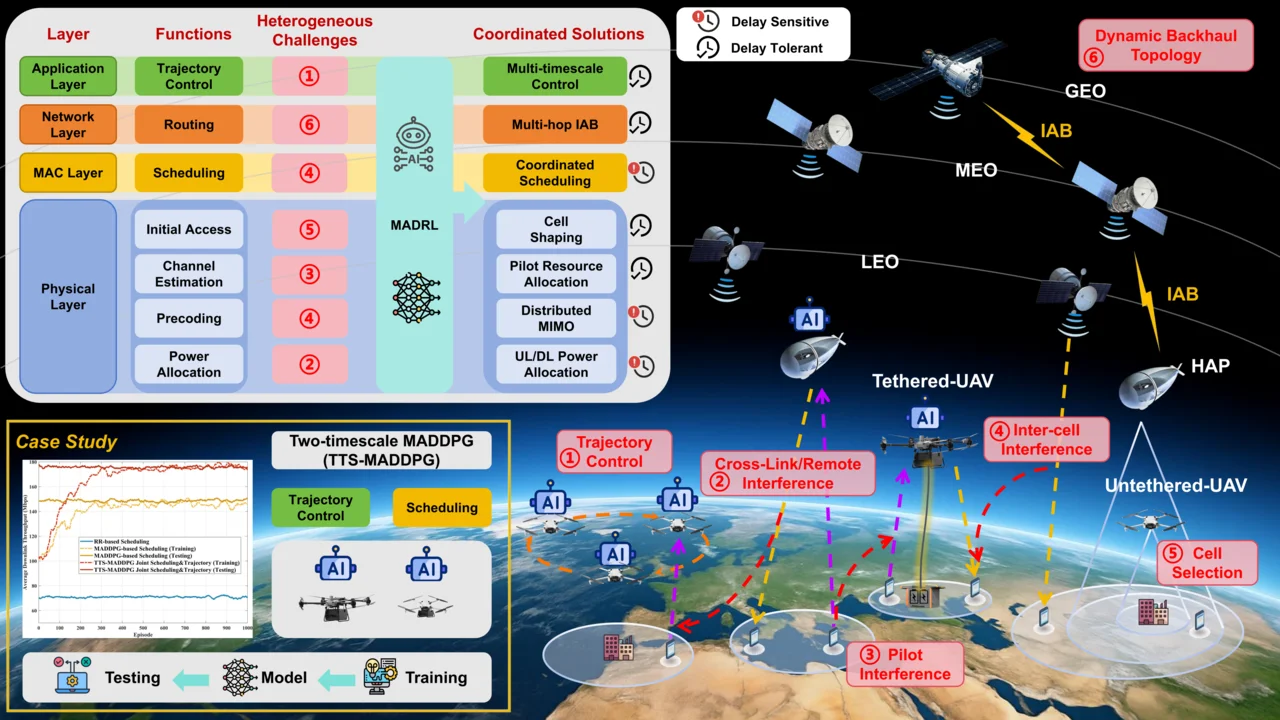
First analyzed the unique characteristics of non-terrestrial networks (NTN) platforms with impact on network specification, and proposed an efficient distributed coordination framework for heterogeneous NTN, verified by a case study on IAB-enabled heterogeneous UAV networks.